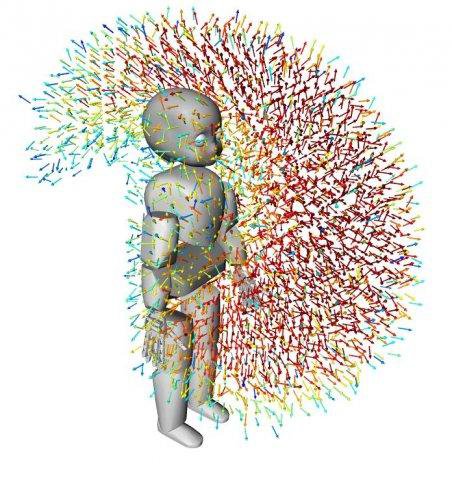
Una caja de herramientas de simulación de robot, plataforma de movimiento y planificación de agarre independiente de la plataforma que consta de tres módulos: VirtualRobot para simular y visualizar robots, Saba, la biblioteca de planificación de movimiento basada en muestreo y GraspStudio para la planificación de agarre.
Caracteristicas
- planificación de movimiento
- planificar la comprensión
- simulación robot
- cinemática
- Explorando rápidamente árboles al azar
")