
Te presentamos estos 12 programas gratuitos, ideales para estudiantes y profesionales de la robótica, tanto para trabajar como para aprender.
Todos estos programas son gratuitos, esperamos que los descarguen, los prueben y nos dejen sus comentarios y opiniones.
Deseamos que os gusten. ¡Compártelas!
OpenCV - Biblioteca de visión por computadora de código abierto.
La Biblioteca de visión por computadora de código abierto tiene> 2500 algoritmos, documentación extensa y código de muestra para visión por computadora en tiempo real. Funciona en Windows, Linux, Mac OS X, Android e iOS.
Robocode - Un juego de tanques de programación para Java y .NET.
Robocode es un juego de programación, donde el objetivo es desarrollar un tanque de batalla robot para luchar contra otros tanques en Java o .NET. Las batallas de robots se ejecutan en tiempo real y en pantalla. El lema de Robocode es: ¡Construye lo mejor, destruye el resto!

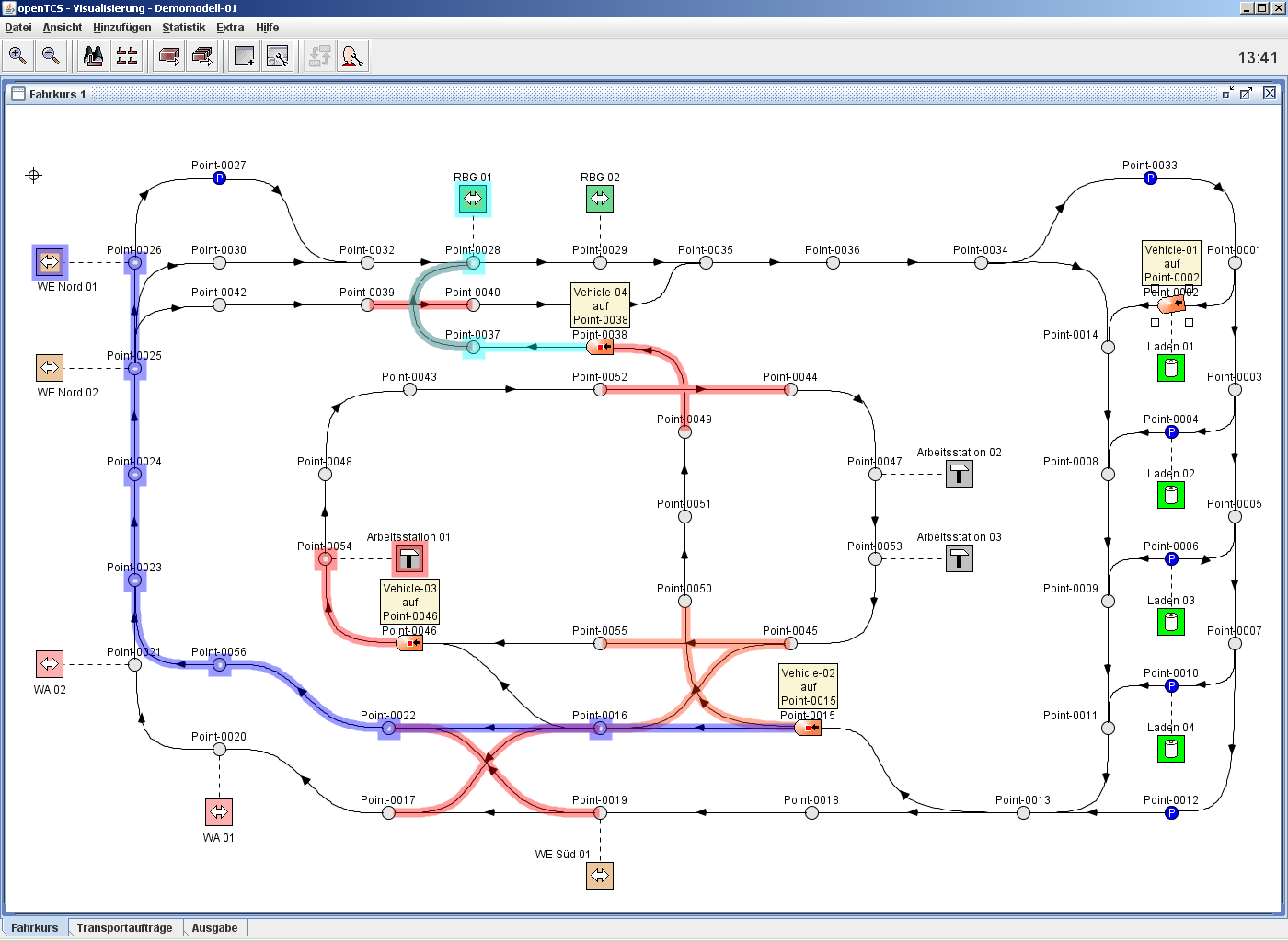
openTCS - Sistema de control de transporte abierto.
openTCS es un sistema de control de transporte (TCS) independiente de la plataforma destinado a administrar flotas de vehículos automáticos guiados (AGV), pero se puede utilizar para administrar prácticamente cualquier vehículo automático. Consiste en un núcleo abstracto que implementa algoritmos y estrategias reemplazables (cálculo de rutas, despacho de pedidos a vehículos, programación de recursos, etc.), conductores de vehículos conectables que implementan protocolos de comunicación y una interfaz gráfica para crear y visualizar modelos lógicos de áreas. los vehículos se están moviendo.
BoofCV - Una biblioteca Java de código abierto para visión por computadora en tiempo real.
BoofCV is an open source Java library for real-time computer vision and robotics applications. Written from scratch for ease of use and high performance, it provides both basic and advanced features needed for creating a computer vision system. Functionality include optimized low level image processing routines (e.g. convolution, interpolation, gradient) to high level functionality such as image stabilization. Released under an Apache 2.0 license for both academic and commercial use.

Robotics Lab - Software de código abierto, que incluye simulación básica, control y visión.
Bienvenido a la sucursal abierta del grupo de investigación Robotics Lab @ Universidad Carlos III de Madrid (UC3M)..
RS Media Robot Development Kit - Una serie de archivos y programas de código abierto disponibles para usar para desarrollar programas que funcionen con el Robot RSMedia.
Una serie de archivos y programas de código abierto disponibles para usar para desarrollar programas que funcionen con el Robot WowWee Robotics RSMedia. Estos incluyen una consola serie USB, un compilador cruzado, un programa de volcado de firmware, texto a voz y código fuente.

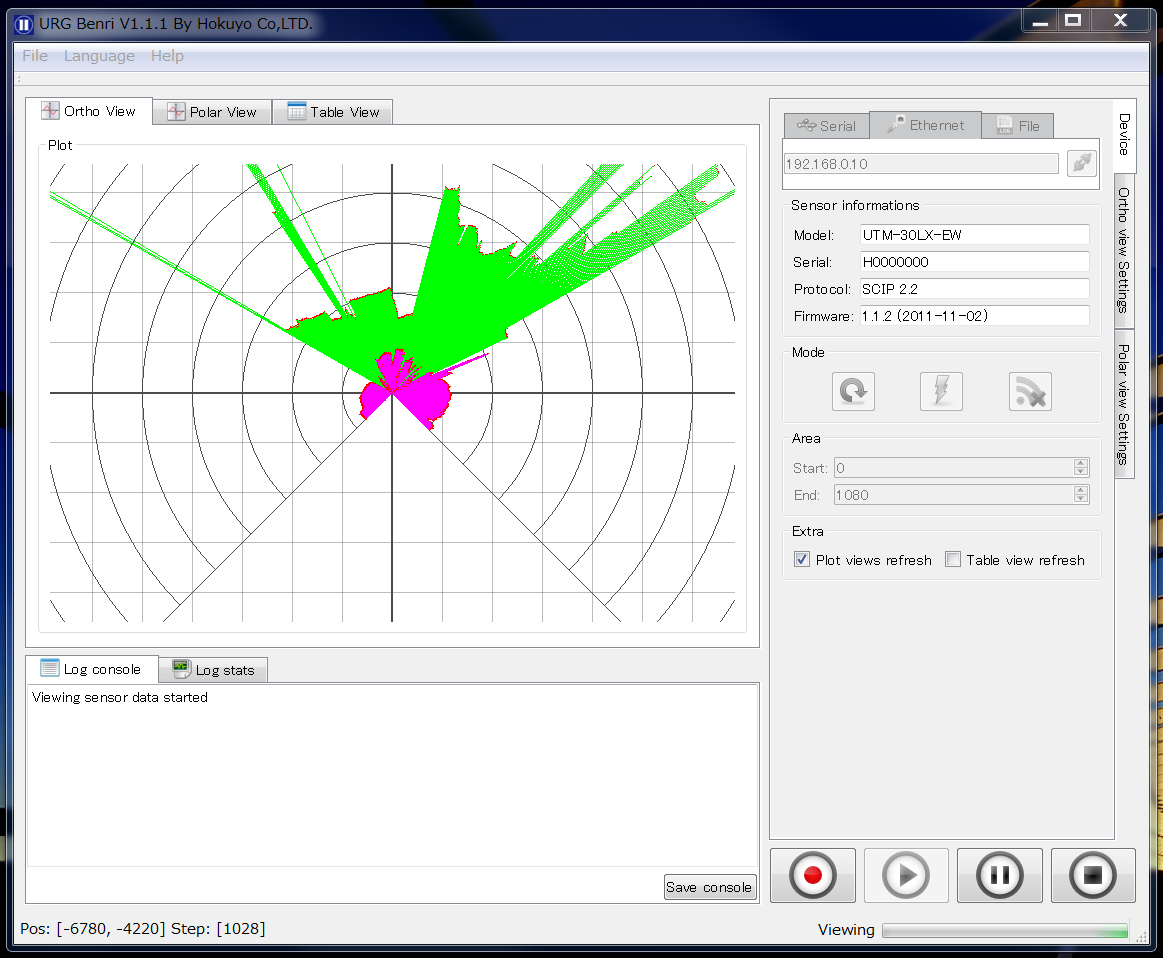
UrgBenri - Una herramienta útil para ver, grabar y reproducir datos del sensor URG.
Una herramienta útil para ver, grabar y reproducir datos del sensor URG. El sensor está hecho por Hokuyo CO., LTD.
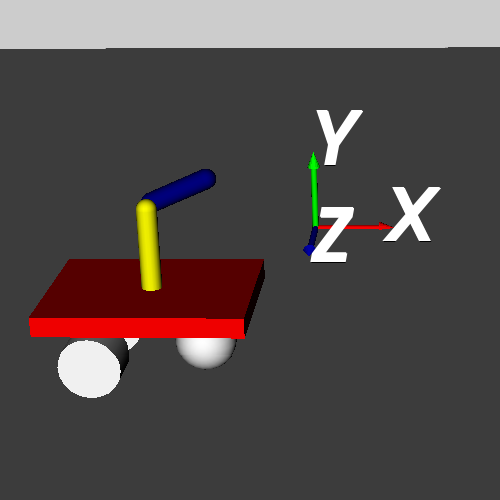
Autonomous Robot Simulator - Simulador de robótica físicamente preciso escrito en Python.
ARS es un simulador de robótica físicamente preciso escrito en Python. Su objetivo principal es ayudar a los investigadores a desarrollar manipuladores móviles y, en general, cualquier sistema de múltiples cuerpos. Es de código abierto, modular, fácil de aprender y usar, y puede ser una herramienta valiosa en el proceso de diseño de robots, en el desarrollo de algoritmos de control y razonamiento, así como en actividades de enseñanza y educación.
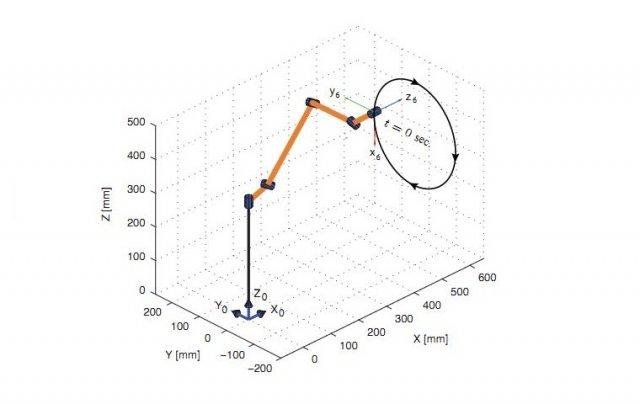
KUKA Control Toolbox (KCT) - Una colección de funciones para el control de movimiento de los manipuladores de robots KUKA.
Una colección de funciones MATLAB desarrolladas en la Universidad de Siena, para el control de movimiento de los manipuladores de robots KUKA..
Simox - Una caja de herramientas de simulación de robot, plataforma de movimiento y planificación de agarre.
Una caja de herramientas de simulación de robot, plataforma de movimiento y planificación de agarre independiente de la plataforma que consta de tres módulos: VirtualRobot para simular y visualizar robots, Saba, la biblioteca de planificación de movimiento basada en muestreo y GraspStudio para la planificación de agarre.
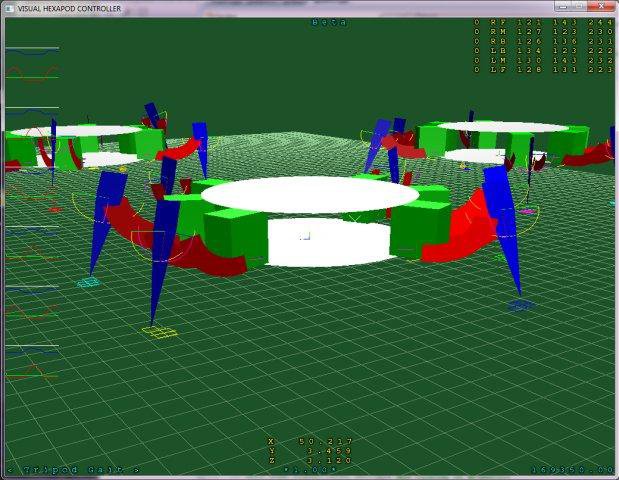
Visual Hexapod Controller - Construir un entorno de simulación 3D.
El objetivo de este proyecto es construir un entorno de simulación 3D para controlar un hexapod y comunicarse en serie con dicho hexapod cuando está conectado. De esta forma, se pueden perfeccionar nuevos algoritmos de movimiento sin dañar su robot.
NiboRoboLib - Biblioteca C y C ++ para los robots NIBObee, NIBO burger y NIBO 2.
Biblioteca C y C ++ para los robots NIBObee, NIBO burger y NIBO 2. La biblioteca contiene bibliotecas para el desarrollo de AVR Studio y Arduino, controladores USB y el software de programación RoboDude.
")



















