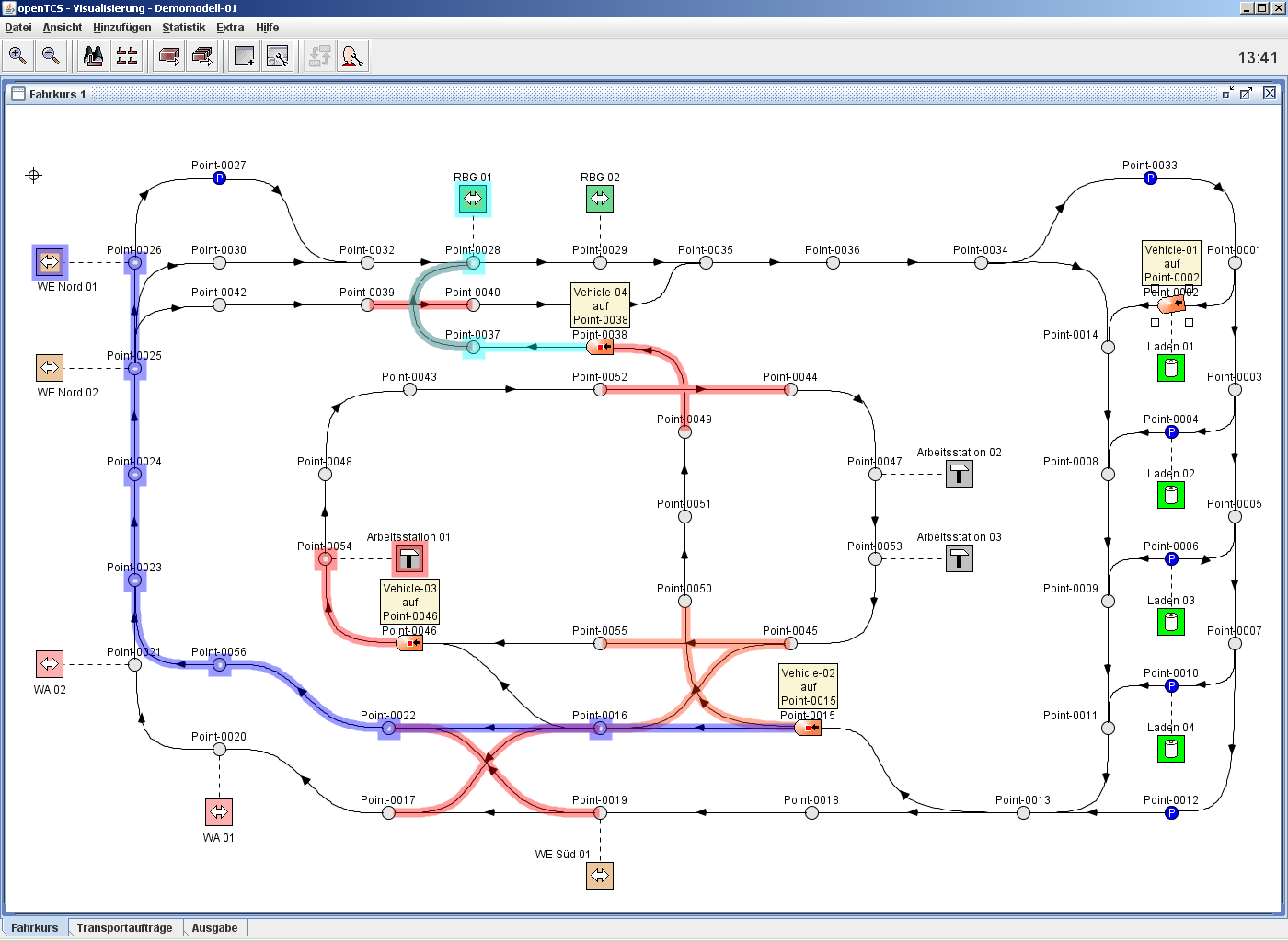
openTCS es un sistema de control de transporte (TCS) independiente de la plataforma destinado a administrar flotas de vehículos automáticos guiados (AGV), pero se puede utilizar para administrar prácticamente cualquier vehículo automático. Consiste en un núcleo abstracto que implementa algoritmos y estrategias reemplazables (cálculo de rutas, despacho de pedidos a vehículos, programación de recursos, etc.), conductores de vehículos conectables que implementan protocolos de comunicación y una interfaz gráfica para crear y visualizar modelos lógicos de áreas. los vehículos se están moviendo
Caracteristicas
- Independiente del fabricante / vendedor del vehículo
- Conductores de vehículos enchufables
- Estrategias reemplazables para enrutamiento, despacho y programación de vehículos.
- Independiente de la plataforma: escrito en Java
")


















