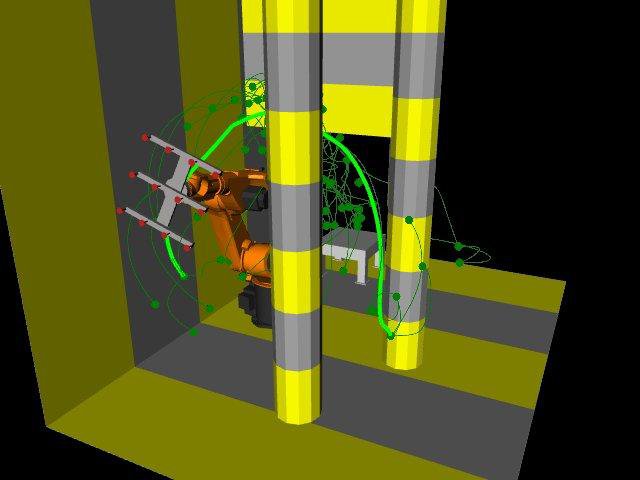
La Biblioteca de Robótica (RL) es una biblioteca de C ++ autónoma para cinemática y dinámica de cuerpo rígido, planificación de movimiento y control. Cubre álgebra de vectores espaciales, sistemas multicuerpo, abstracción de hardware, planificación de rutas, detección de colisiones y visualización.
Formulario de busqueda
Marco C ++ para cinemática de robots, dinámica, planificación de movimiento, control
Categorías Profesionales
Top descargas
") Descargar música mp3 gratis rápido y seguro con MP3 Clan
Descargar música mp3 gratis rápido y seguro con MP3 Clan Powtoon gratis
Powtoon gratis Mp3XD
Mp3XD eMP3 Downloads
eMP3 Downloads GeoEnzo online
GeoEnzo online Statistics Problem Solver
Statistics Problem Solver UNOARDUSIM
UNOARDUSIM Virtual DJ
Virtual DJ Viva Video
Viva Video Descargar base de datos en excel
Descargar base de datos en excel Autodesk Homestyler
Autodesk Homestyler ManualsLib
ManualsLib Descargar videos de youtube gratis con Tubemate App
Descargar videos de youtube gratis con Tubemate App ProfiCAD
ProfiCAD Sebran
Sebran
Programas más vistos recientemente
 OpenSong
OpenSong ManualsLib
ManualsLib Converto
Converto Descargar videos de youtube gratis con Tubemate App
Descargar videos de youtube gratis con Tubemate App Descargar base de datos en excel
Descargar base de datos en excel ChemSpider
ChemSpider BASIC-256
BASIC-256 EaseUS Todo Backup
EaseUS Todo Backup Solve Elec
Solve Elec Appear.in
Appear.in
© banana-soft.com es