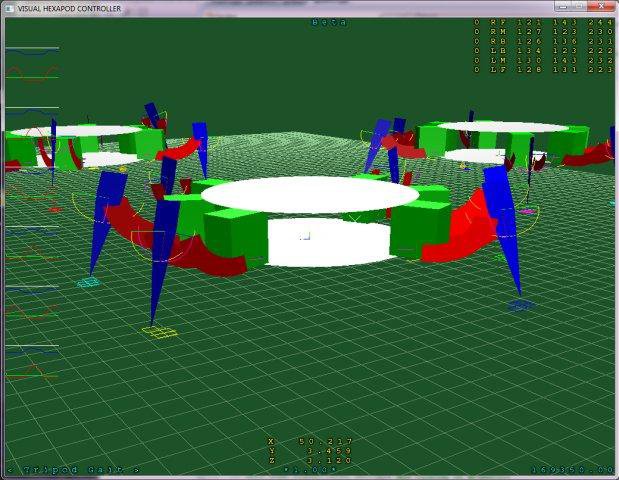
El objetivo de este proyecto es construir un entorno de simulación 3D para controlar un hexapod y comunicarse en serie con dicho hexapod cuando está conectado. De esta forma, se pueden perfeccionar nuevos algoritmos de movimiento sin dañar su robot.
Caracteristicas
- firmware arduino para placas DisplayDuino
- simulación fuera de línea: enseñe a su robot antes de romperlo
- * debe * compilar de forma cruzada sin problemas importantes
")

















")