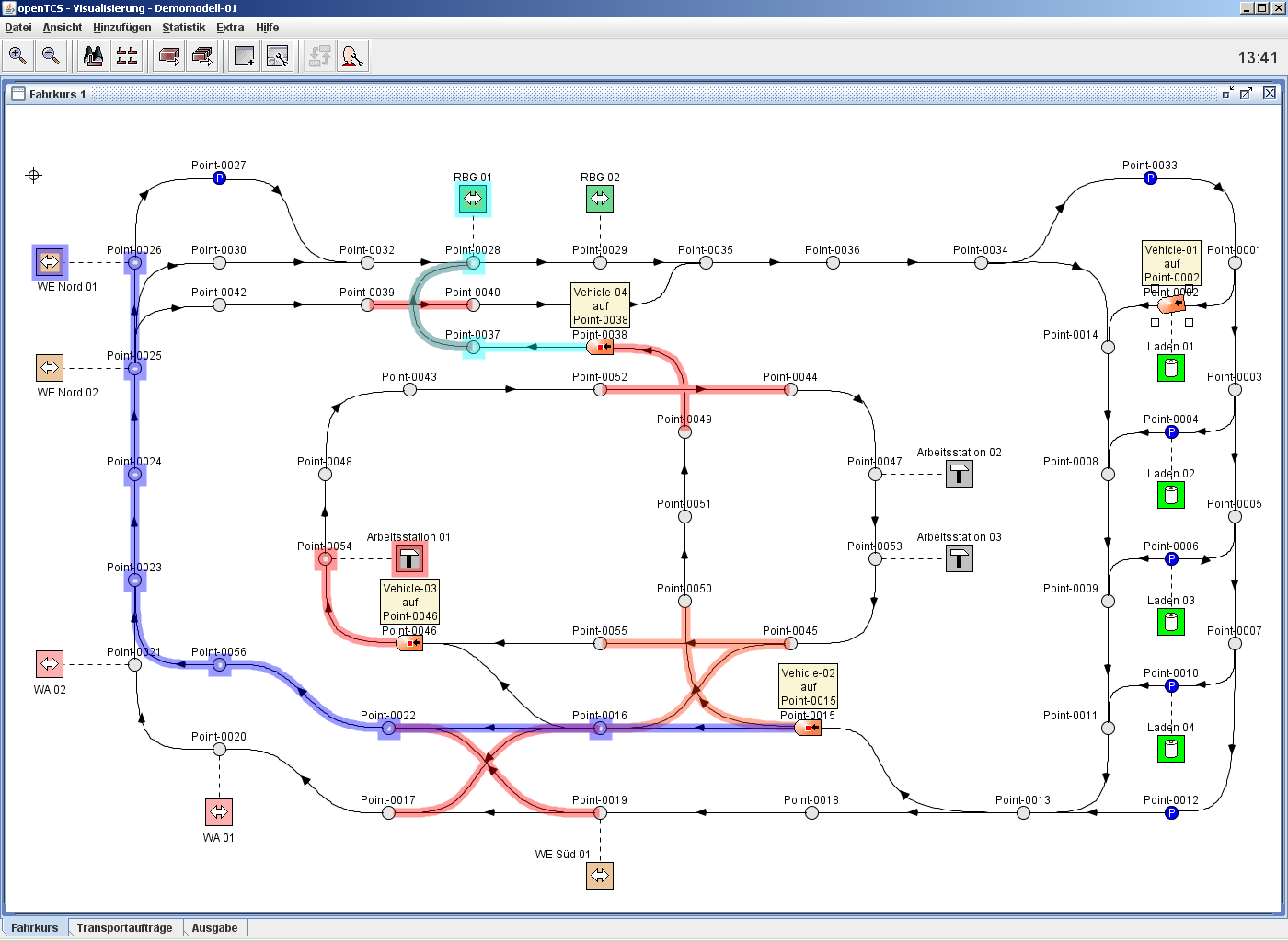
openTCS is a platform-independent transportation control system (TCS) intended to manage fleets of automatic guided vehicles (AGVs), but can be used to manage virtually any automatic vehicle. It consists of an abstract kernel that implements replaceable algorithms and strategies (computation of routes, dispatching of orders to vehicles, scheduling of resources etc.), pluggable vehicle drivers that implement communication protocols and a graphical frontend for creating and visualizing logical models of areas the vehicles are moving in.
Features
- Independent of vehicle manufacturer/vendor
- Pluggable vehicle drivers
- Replaceable strategies for routing, dispatching and scheduling of vehicles
- Platform-independent: written in Java
















