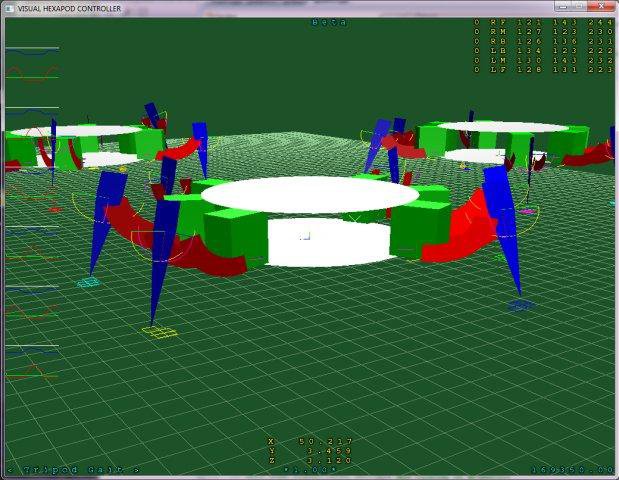
This project's aim is to build a 3D simulation environment to control a hexapod, and communicate serially to said hexapod when connected. This way new motion algorithms can be perfected without damaging your robot.
Features
- arduino firmware for DisplayDuino boards
- off-line simulation - teach your robot before you break your robot
- *should* cross compile without any major issues


















