Formulario de busqueda
Ingenieros biomecánicos

Una colección de funciones MATLAB desarrolladas en la Universidad de Siena, para el control de movimiento de los manipuladores de robots KUKA.

KUKA Control Toolbox (KCT)
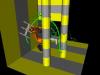
Una caja de herramientas de simulación de robot, plataforma de movimiento y planificación de agarre independiente de la plataforma

Simox
Construir un entorno de simulación 3D para controlar un hexapod y comunicarse en serie con dicho hexapod cuando está conectado.
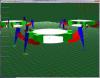
Visual Hexapod Controller



Una caja de herramientas de simulación FEM de elementos finitos y física totalmente integrada, flexible y fácil de usar para MATLAB
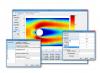
FEATool Multiphysics
Categorías Profesionales
Top descargas
") Descargar música mp3 gratis rápido y seguro con MP3 Clan
Descargar música mp3 gratis rápido y seguro con MP3 Clan Powtoon gratis
Powtoon gratis Mp3XD
Mp3XD eMP3 Downloads
eMP3 Downloads GeoEnzo online
GeoEnzo online Statistics Problem Solver
Statistics Problem Solver UNOARDUSIM
UNOARDUSIM Virtual DJ
Virtual DJ Viva Video
Viva Video Descargar base de datos en excel
Descargar base de datos en excel Autodesk Homestyler
Autodesk Homestyler ManualsLib
ManualsLib Descargar videos de youtube gratis con Tubemate App
Descargar videos de youtube gratis con Tubemate App ProfiCAD
ProfiCAD Sebran
Sebran
Programas más vistos recientemente
 FreePCB
FreePCB Freepik
Freepik Critical Depth in Open Channels
Critical Depth in Open Channels Scribus
Scribus Symbaloo
Symbaloo Learnabout Electronics
Learnabout Electronics Virtual Lab
Virtual Lab Coursera
Coursera 3D Builder
3D Builder Graphulator
Graphulator
© banana-soft.com es