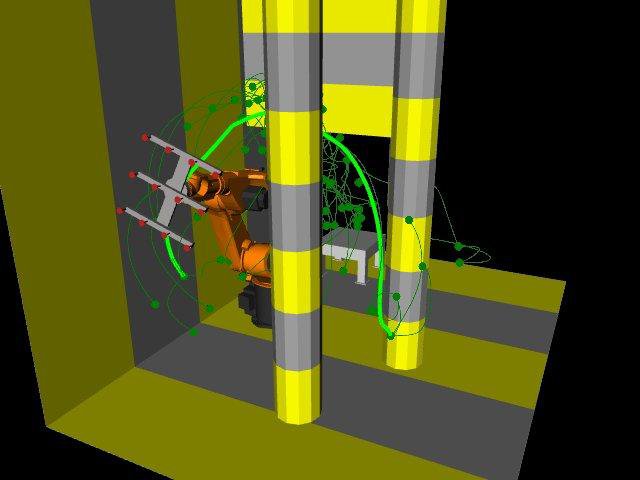
The Robotics Library (RL) is a self-contained C++ library for rigid body kinematics and dynamics, motion planning, and control. It covers spatial vector algebra, multibody systems, hardware abstraction, path planning, collision detection, and visualization.
Search form
C++ framework for robot kinematics, dynamics, motion planning, control
Professional Areas
Top downloads
 MP3 Clan | Download free MP3 music
MP3 Clan | Download free MP3 music PowToon
PowToon Mp3XD
Mp3XD eMP3 Downloads
eMP3 Downloads GeoEnzo
GeoEnzo Statistics Problem Solver
Statistics Problem Solver UNOARDUSIM
UNOARDUSIM Virtual DJ
Virtual DJ VivaVideo
VivaVideo Autodesk Homestyler
Autodesk Homestyler ManualsLib
ManualsLib Tubemate App | Download youtube videos for free
Tubemate App | Download youtube videos for free ProfiCAD
ProfiCAD Sebran
Sebran Creador de Orlas
Creador de Orlas
Most recent viewed
 SoftCatala
SoftCatala Blubbr
Blubbr Solve Elec
Solve Elec Figuro
Figuro Vettev
Vettev MeshLab
MeshLab LibreOffice
LibreOffice DWSIM - Open Source Process Simulator
DWSIM - Open Source Process Simulator Giffing Tool
Giffing Tool Converto
Converto
© banana-soft.com es