We present these 12 free programs, ideal for students and professionals of robotics, both to work and to learn.
All these programs are free, we hope that you download them, try them and leave us your comments and opinions.
We wish you like them. Share them!
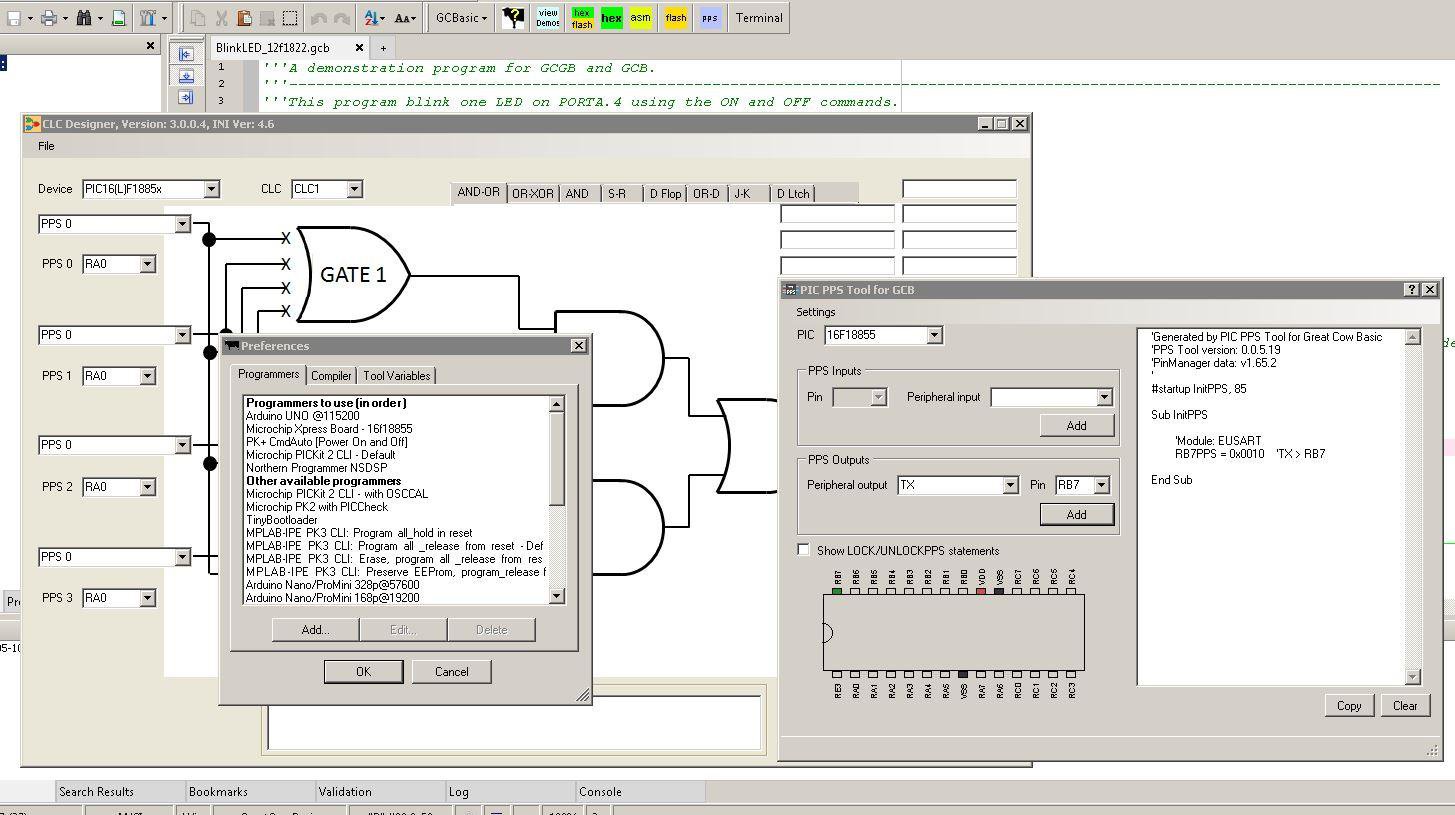
Great Cow BASIC - An open-source BASIC compiler for 8 bit Microchip PIC and Atmel AVR microcontrollers
Great Cow BASIC is an open-source BASIC compiler for 8 bit Microchip PIC and Atmel AVR microcontrollers. Also included in the project is Great Cow Graphical BASIC, an icon based editor for GCBASIC programs.
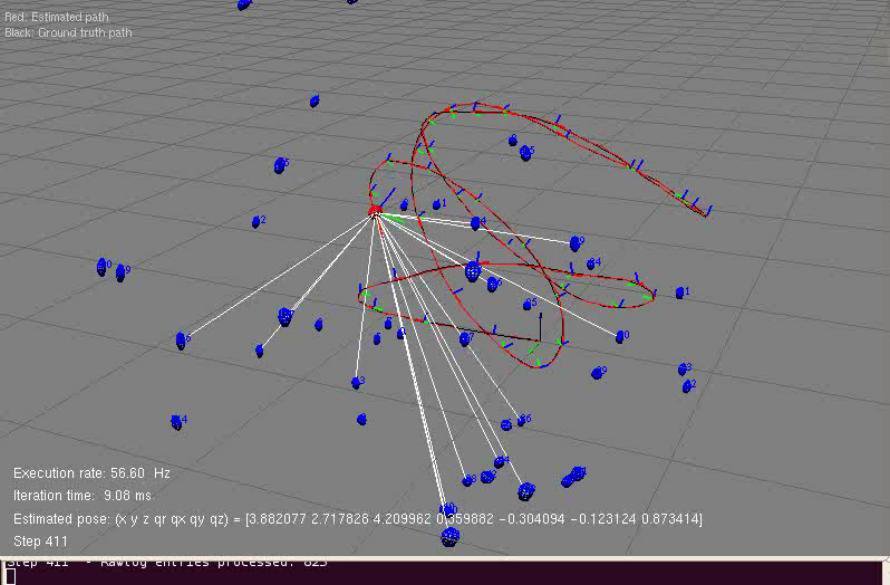
Mobile Robot Programming Toolkit - An extensive, cross-platform, and open source C++ library aimed for robotics researchers to design and implement algorithms about Localization, SLAM, Navigation, computer vision
The Mobile Robot Programming Toolkit (MRPT) is an extensive, cross-platform, and open source C++ library aimed for robotics researchers to design and implement algorithms about Localization, SLAM, Navigation, computer vision.
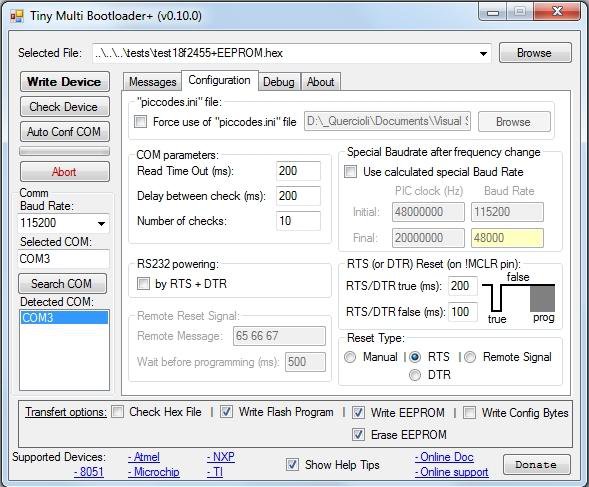
Tiny Multi Bootloader+ - Serial Bootloader for Microchip, Atmel, NXP, TI, 8051 microcontrolers
It's a Bootloader for Microchip, Atmel, NXP, TI and 8051 devices.
A Bootloader is a firmware running in the microcontroler device which allows the user to send it's own firmware without the need of a programmer.
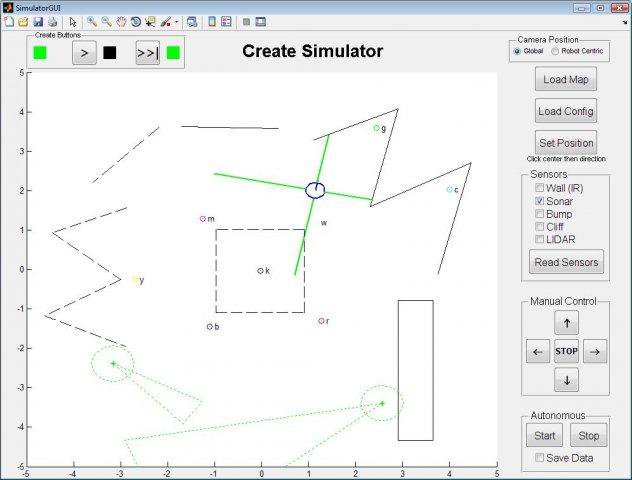
iRobot Create Simulator - A MATLAB toolbox for simulating the movement of the iRobot Create
A MATLAB toolbox for simulating the movement of the iRobot Create. Contains multiple GUIs for creating maps and other input, showing the movement of the Create, and replaying a previously saved session.
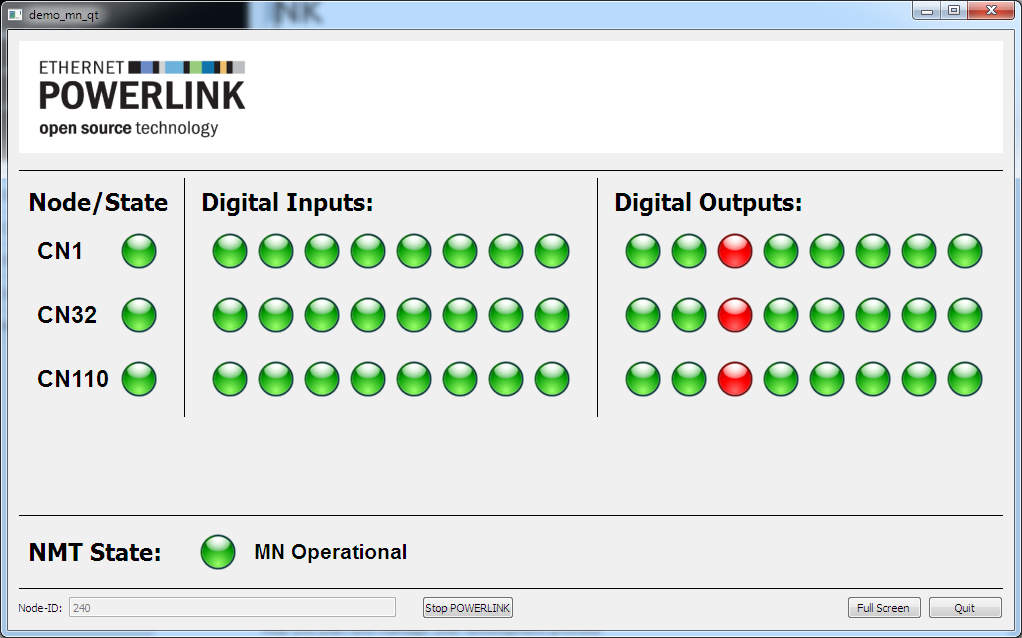
openPOWERLINK - An Open Source Industrial Ethernet stack for communication in hard real-time
OpenPOWERLINK is an Open Source Industrial Ethernet stack for communication in hard real-time. It can be operated as both, Managing Node (master) and Controlled Node (slave).
PROS - Custom firmware and IDE for the VEX Cortex Microcontroller
PROS is a lightweight and fast alternative operating system for the VEX Cortex Microcontroller. It features multitasking, low-level control, and Wiring compatible functions to harness the full power of the Cortex. With a real-time kernel based on FreeRTOS and a development environment built on Eclipse CDT, PROS uses proven software to increase the reliability and usability of the VEX development system across all three major computing platforms.
RobotCub - Onvestigating issues in embodied cognition
iCub is an open platform for scientists interested in investigating issues in embodied cognition. Here you find all the software and hardware documentation.
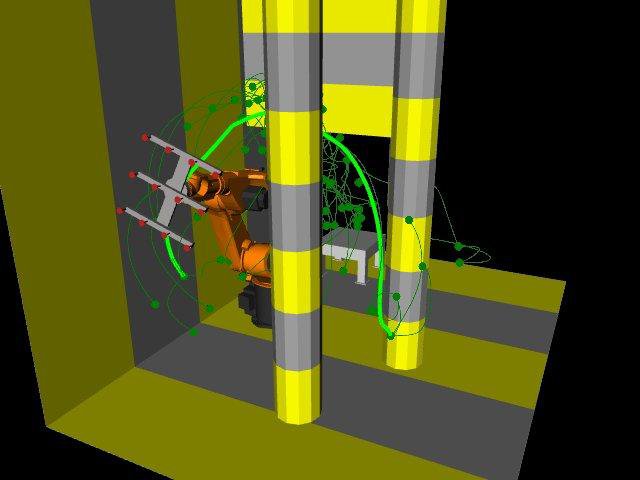
Robotics Library - C++ framework for robot kinematics, dynamics, motion planning, control
The Robotics Library (RL) is a self-contained C++ library for rigid body kinematics and dynamics, motion planning, and control. It covers spatial vector algebra, multibody systems, hardware abstraction, path planning, collision detection, and visualization.
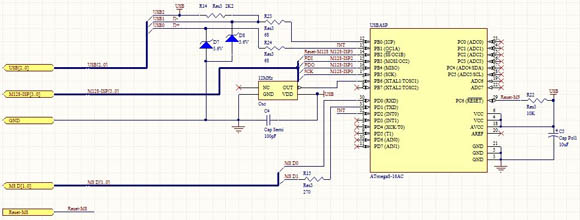
DefendLineII - ATMEL ATMega1280 hardware platform for home and industrial processes automation, robotic toys, security systems, education and enjoyment
ATMEL ATMega1280 based powerful, multifunctional, reliable, expandable and extremely flexible hardware platform for home and industrial processes automation, robotic toys, security systems, education and enjoyment.

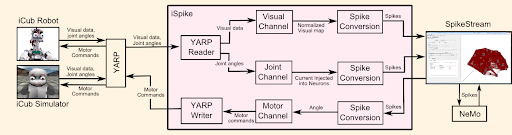
iSpike - A spiking neural interface between the iCub humanoid robot and a spiking neural simulator such as NeMo.T
iSpike is a spiking neural interface between the iCub humanoid robot and a spiking neural simulator such as NeMo.The system aims to provide an interface for the iCub that provides as biologically realistic spike trains from its senses as possible.
geneyeOS - Free operating system for biorobots
Free operating system for biorobots. If you biorobot, you can download an installation image of our OS is directly from here.

FunnyRobot - Designs an educational robot controller that is programmable via USB
The FunnyRobot project designs an educational robot controller that is programmable via USB. Both the hardware and software are configurable and extensible. Users can build programs with a C++ library and run them under a real-time operating system.