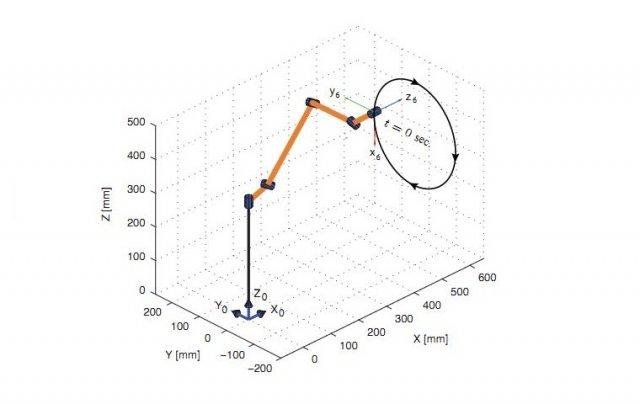
The KUKA Control Toolbox (KCT) is a collection of MATLAB functions developed at the University of Siena, for motion control of KUKA robot manipulators.
Search form
A collection of MATLAB functions developed at the University of Siena, for motion control of KUKA robot manipulators.
Professional Areas
Top downloads
 MP3 Clan | Download free MP3 music
MP3 Clan | Download free MP3 music PowToon
PowToon Mp3XD
Mp3XD eMP3 Downloads
eMP3 Downloads GeoEnzo
GeoEnzo Statistics Problem Solver
Statistics Problem Solver UNOARDUSIM
UNOARDUSIM Virtual DJ
Virtual DJ VivaVideo
VivaVideo Autodesk Homestyler
Autodesk Homestyler ManualsLib
ManualsLib Tubemate App | Download youtube videos for free
Tubemate App | Download youtube videos for free ProfiCAD
ProfiCAD Sebran
Sebran Creador de Orlas
Creador de Orlas
Most recent viewed
 Duolingo
Duolingo Autodesk Homestyler
Autodesk Homestyler eMP3 Downloads
eMP3 Downloads Virtual DJ
Virtual DJ MolView
MolView Screencast-O-Matic
Screencast-O-Matic PowToon
PowToon MakePrintable
MakePrintable BASIC-256
BASIC-256 Archi
Archi
© banana-soft.com es