We present these 12 free programs, ideal for students and professionals of robotics, both to work and to learn.
All these programs are free, we hope that you download them, try them and leave us your comments and opinions.
We wish you like them. Share them!
OpenCV - Open Source Computer Vision Library
The Open Source Computer Vision Library has >2500 algorithms, extensive documentation and sample code for real-time computer vision.
Robocode - Robocode is a programming tank game for Java and .NET
Robocode is a programming game, where the goal is to develop a robot battle tank to battle against other tanks in Java or .NET. The robot battles are running in real-time and on-screen.

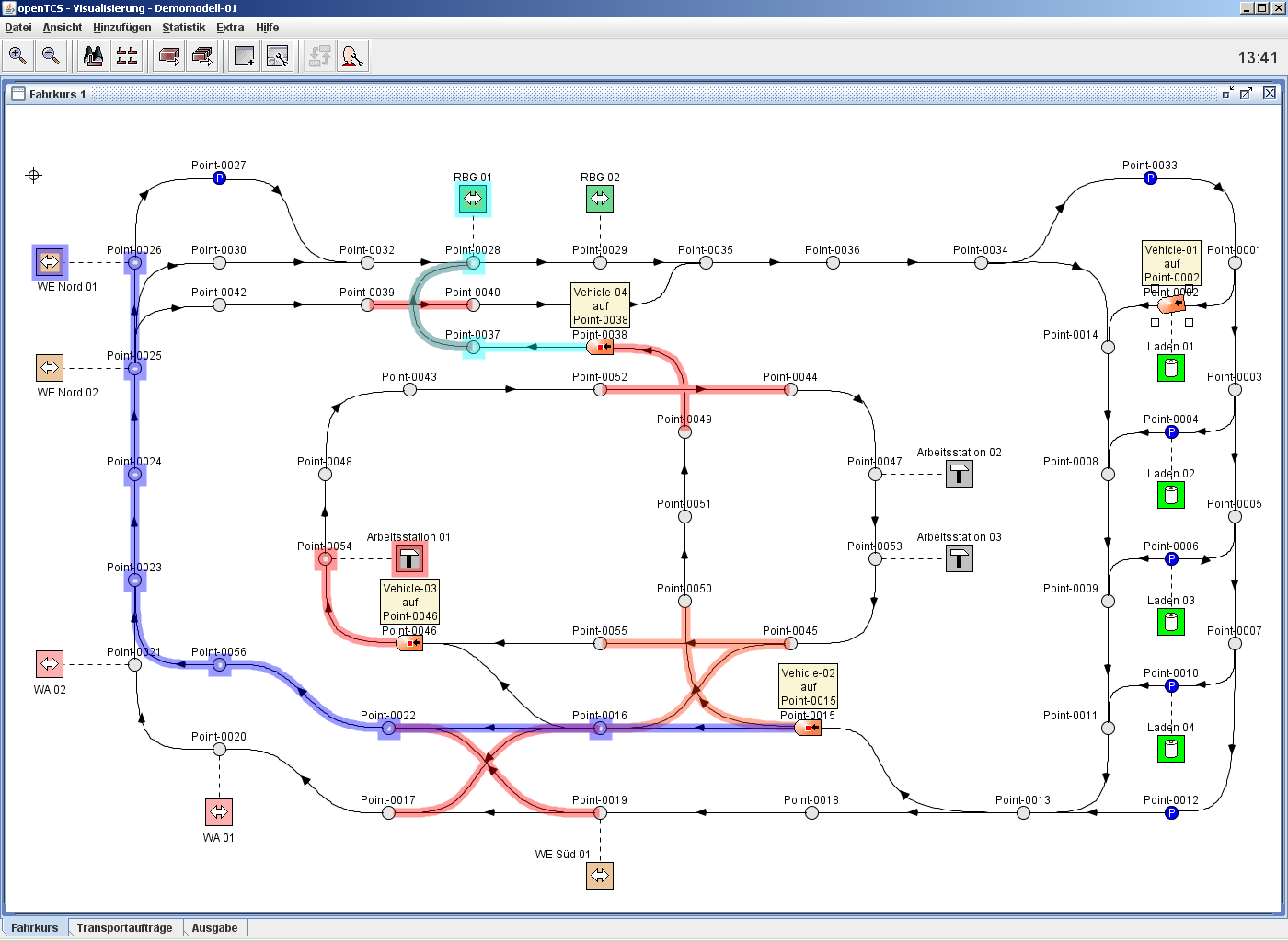
openTCS - Open Transportation Control System
openTCS is a platform-independent transportation control system (TCS) intended to manage fleets of automatic guided vehicles (AGVs), but can be used to manage virtually any automatic vehicle.
BoofCV - BoofCV is an open source Java library for real-time computer vision.
BoofCV is an open source Java library for real-time computer vision and robotics applications. Written from scratch for ease of use and high performance, it provides both basic and advanced features needed for creating a computer vision system.

Robotics Lab - Open Source from the Robotics Lab research group @ UC3M
Welcome to the open branch of the Robotics Lab research group @ Universidad Carlos III de Madrid (UC3M). We currently host 3 main projects here.
RS Media Robot Development Kit - A series of open source files and programs available to use for developing programs to work with the WowWee Robotics RSMedia Robot
A series of open source files and programs available to use for developing programs to work with the WowWee Robotics RSMedia Robot. These include a USB serial console, a cross-compiler, a firmware dump program, text-to-speech and source code.

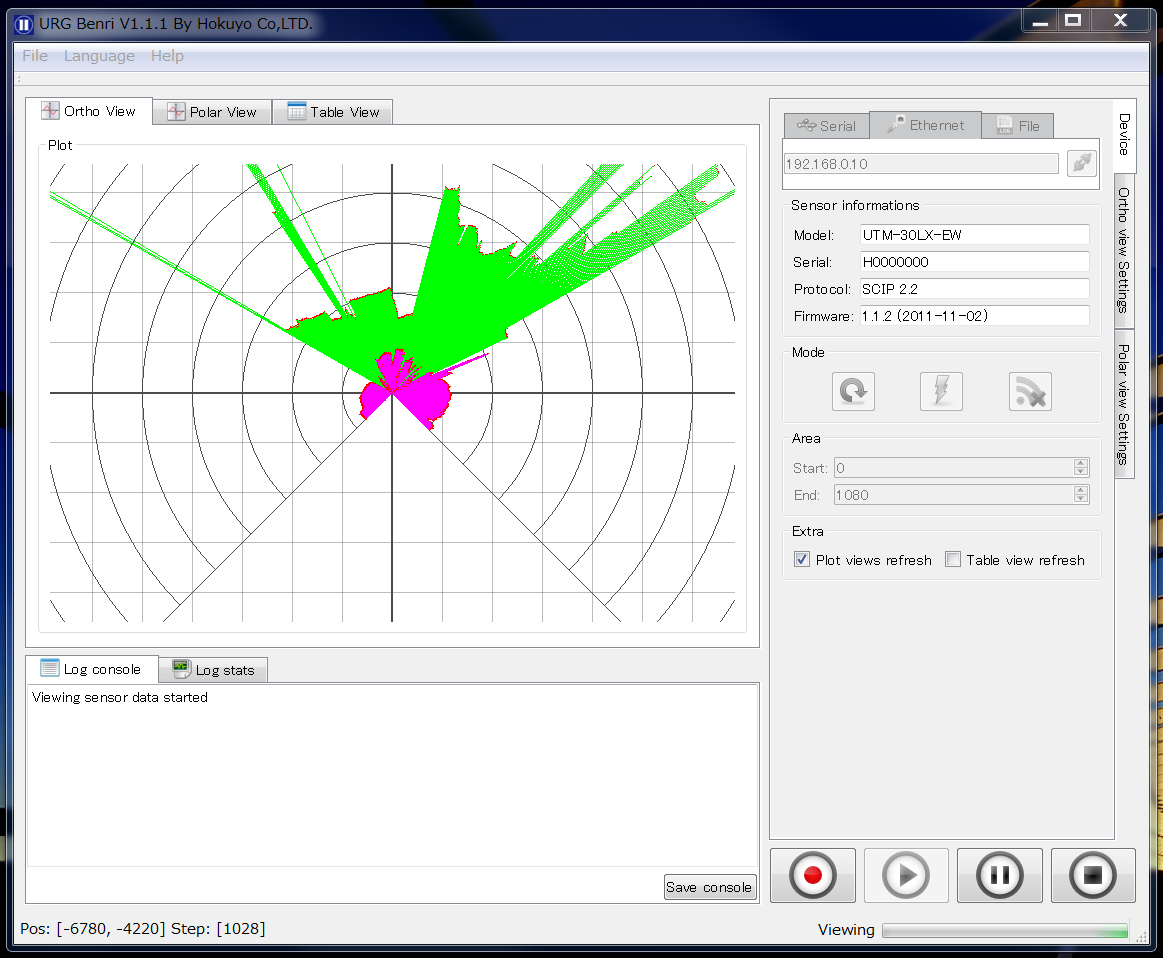
UrgBenri - A useful tool for viewing, recording and replaying URG sensor data
A useful tool for viewing, recording and replaying URG sensor data. The sensor is made by Hokuyo CO.,LTD.
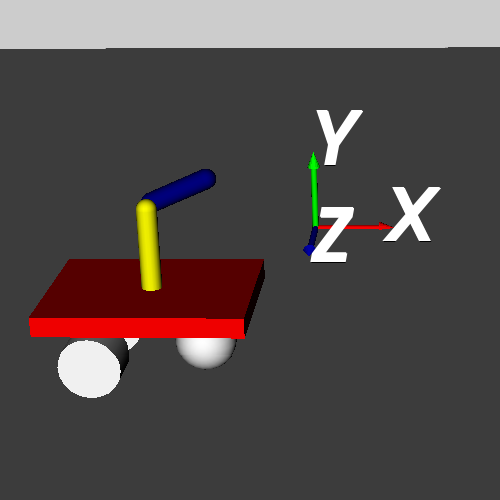
Autonomous Robot Simulator - Physically-accurate robotics simulator written in Python
ARS is a physically-accurate robotics simulator written in Python. It's main purpose is to help researchers with to develop mobile manipulators and, in general, any multi-body system. It is open-source, modular, easy to learn and use, and can be a valuable tool in the process of robot design, in the development of control and reasoning algorithms, as well as in teaching and educational activities.
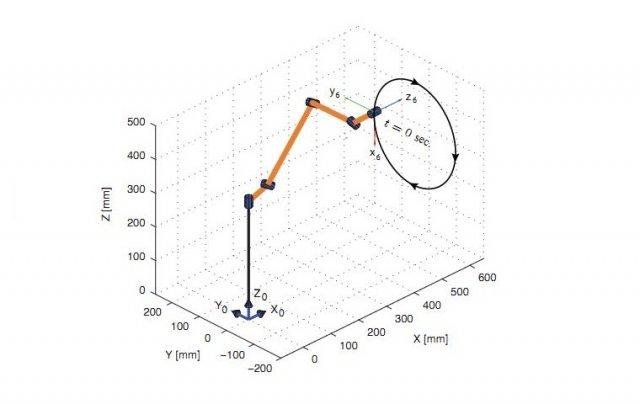
KUKA Control Toolbox (KCT) - A collection of MATLAB functions developed at the University of Siena, for motion control of KUKA robot manipulators.
The KUKA Control Toolbox (KCT) is a collection of MATLAB functions developed at the University of Siena, for motion control of KUKA robot manipulators.
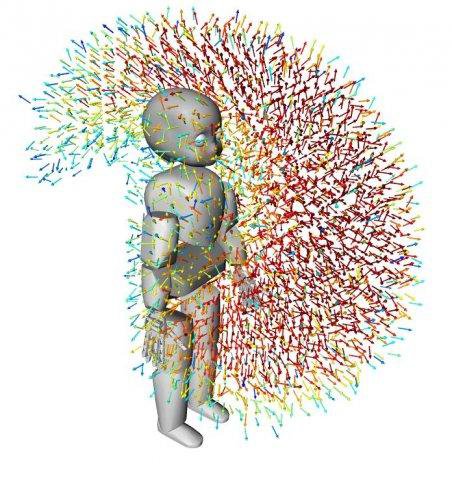
Simox - A platform-independent robot simulation, motion and grasp planning toolbox
A platform-independent robot simulation, motion and grasp planning toolbox consisting of three modules: VirtualRobot to simulate and visualize robots, Saba the sampling-based motion planning library and GraspStudio for grasp planning.
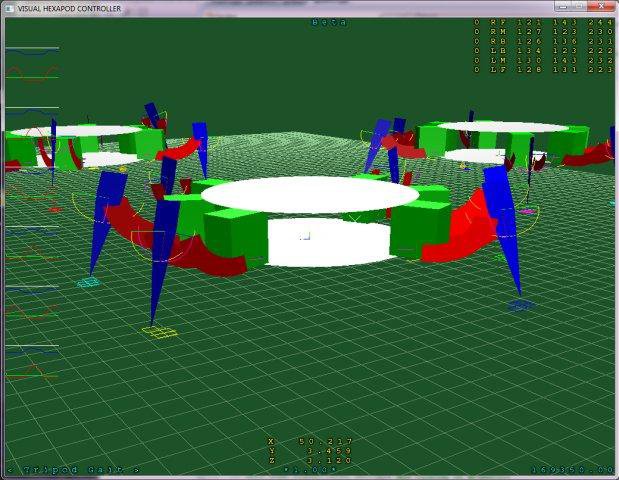
Visual Hexapod Controller - Aim is to build a 3D simulation environment to control a hexapod, and communicate serially to said hexapod when connected
This project's aim is to build a 3D simulation environment to control a hexapod, and communicate serially to said hexapod when connected. This way new motion algorithms can be perfected without damaging your robot.
NiboRoboLib - C and C++ library for the NIBObee, NIBO burger and NIBO 2 robots
C and C++ library for the NIBObee, NIBO burger and NIBO 2 robots. The library contains libraries for AVR Studio and Arduino developement, USB drivers and the RoboDude programming software.